getting started
Getting Started
After following this startup guide, you will have a fully functioning radio-controlled car using the CAN protocol.
Unboxing
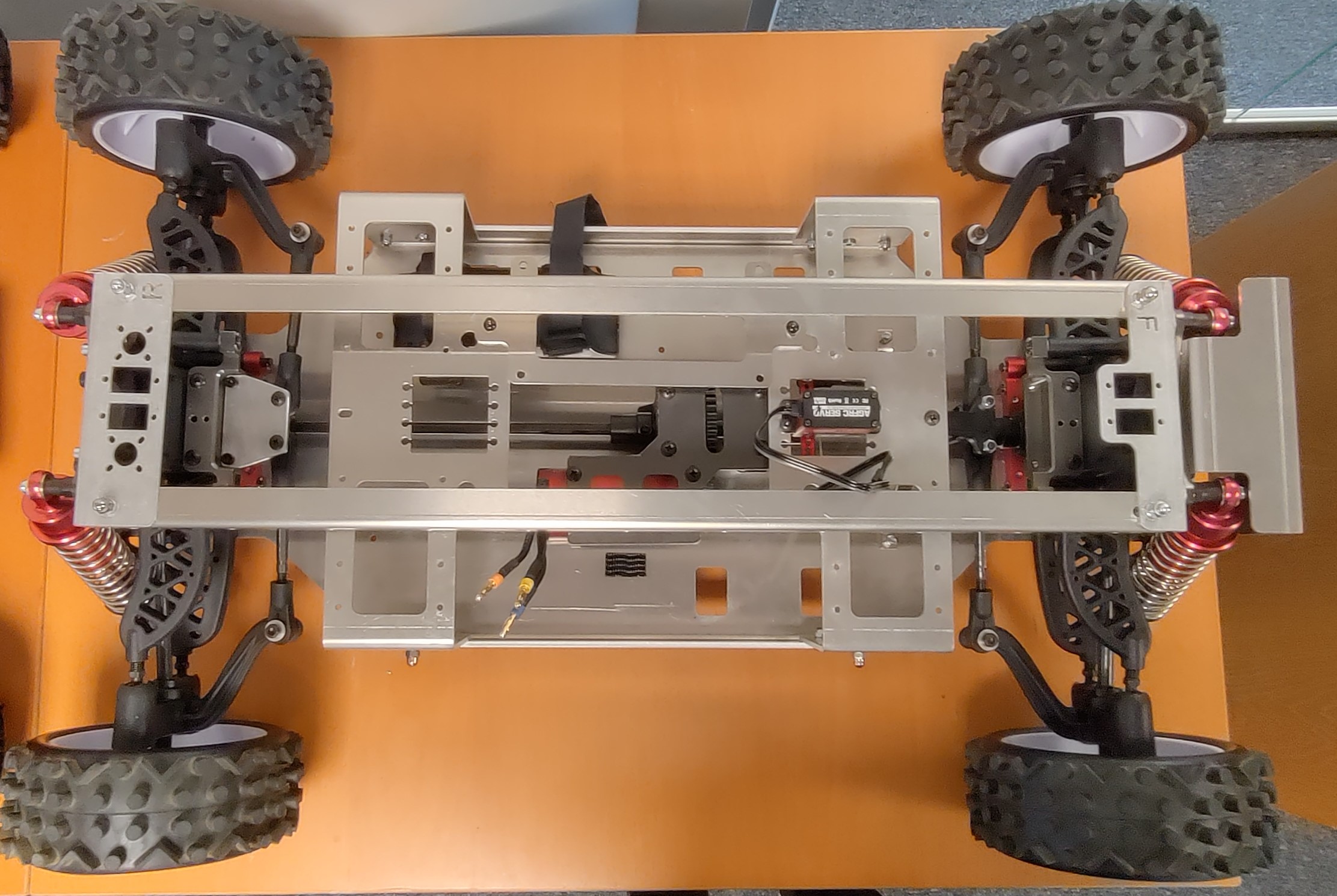
Unbox the car and gather the different components. The car comes with a fully assembled chassis structure, including wheels and a motor. It looks like the picture below:
Connect the Radio Receiver
Before assembling a complete CAN system, we will begin by building a simpler version of the car that runs solely on a radio receiver without CAN communication. This approach helps in understanding the basic function of the simpler components in the system and makes it easier to later integrate CAN functionality. It’s important to note that a fully functional car can be assembled without a CAN communication system. However, with CAN it’s possible to integrate external components into the system, and the Rover becomes more like a real vehicle. To create a car that runs solely on radio communication, refer to the logical connection diagram below, which features fewer components.

Let’s begin by mounting the radio receiver onto the car. Secure the receiver in place using dual-lock bands. For more detailed instructions, refer to the video below:
Connect the ESC and the Battery
The ESC is responsible for controlling the motor. In a system that relies only on radio communication, it must be connected to the battery (for power), the radio receiver (to receive the necessary PWM signal), and the motor. Begin by mounting the battery into the battery holder, as shown in the video below:
Next, secure the ESC to the chassis using dual-lock bands, as demonstrated in this video:
Finally, connect the radio receiver to the ESC and the battery, along with the three wires to the motor. Ensure that the wires are connected in the correct order to avoid the motor rotating in the opposite direction. Refer to the video below for detailed instructions:
At this point, your car should be fully operational through the radio receiver. Feel free to turn it on and take it for a test drive to verify its functionality: