Home
About Us
News
Products
Documentation
Student
Contact us
Search
contact us
Login
contact us
Category:
ROS2
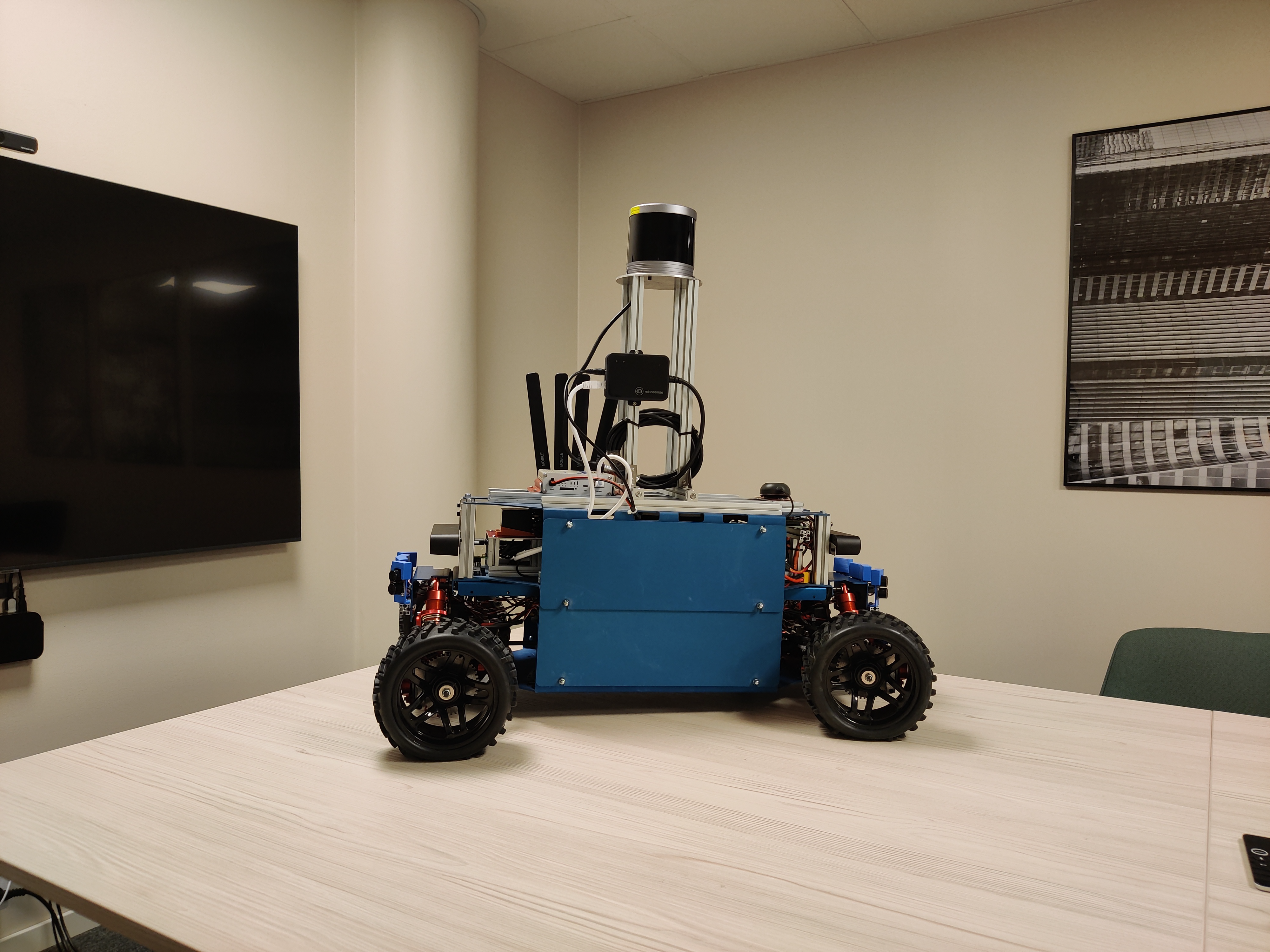
Unlocking the Future with CanEduDev Rover and ROS2 Integration
By Mikkel Gerdes
×
We will email you the product sheet
please provide email
Email Address*